Seite 1 von 1
CX-20 Steuerung ist ungenau
Verfasst: 20:14 ,So 27. Aug 2017,
von Surmana
Hey Leute,
ich habe ein paar Fragen zum CX-20.
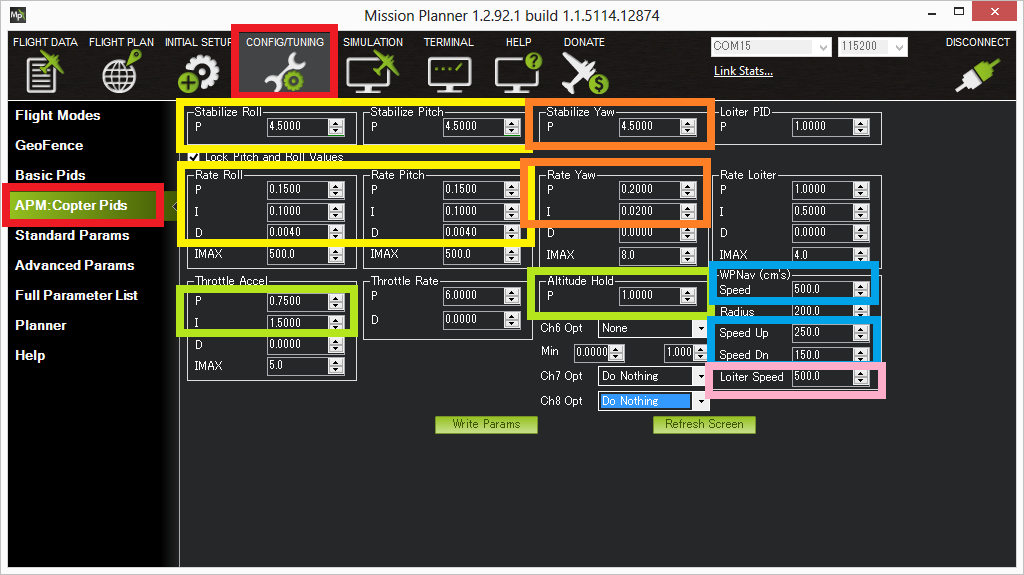
1. Wie genau kann ich die Geschwindigkeit des GPS-Modus oder auch Loiter im Mission Planner erhöhen. Wisst ihr die Namen der Werte?
2. Kann ich die Geschwindigkeit der Drehung um die eigene Achse des Kopters also Linker Stick nach Rechts oder links anpassen? Falls Ja, wie mache ich das?
3. Mein Kopter driftet beim geradeaus fliegen (rechter Stick nach vorne) leicht nach rechts ab. Kann ich das irgendwie beheben? (Dies passiert auch im Loiter, obwohl er gut eingestellt ist und im Stillstand sehr stabil ist.)
Freue mich auf eure Antworten
Leander
Re: CX-20 Steuerung ist ungenau
Verfasst: 20:35 ,So 27. Aug 2017,
von DeWe
fangen wir hinten an :
Accelerometer noch einmal kalibrieren. bevor du startest den Kopter sauber mit Wasserwaagen ausrichten... Kostet die meiste Zeit.
Yaw anpassen : geht ...entweder in der Funke (eine Kurve hinterlegen) bzw für YAW den P Wert entsprechend erhöhen (Parameter = ACRO_YAW_P ).
Loiter Mode : ein kurzer Blick auf
http://ardupilot.org/copter/docs/loiter-mode.html zeigt dir alle relevanten Parametern, jedoch auch die Gefahren bei zu grosser Änderung
Gesendet von meinem Samsung Galaxy Note Pro 12.2 SM-P905 mit Tapatalk
Re: CX-20 Steuerung ist ungenau
Verfasst: 21:04 ,Mo 4. Sep 2017,
von Surmana
Hey,
vielen Dank für deine schnelle Antwort. Ich habe in der zwischen Zeit versucht alles umzusetzen und auch mal ein wenig selber geforscht. Den Loiter-Mode habe ich erfolgreich angepasst vielen Dank. Die beiden anderen Probleme konnte ich allerdings nicht lösen. Das Yaw des Kopters ist weiterhin viel zu schnell bzw. "hektisch". Eine schöne saubere Drehung (Aufnahme) mit konstanter Geschwindigkeit ist nicht möglich. Habt ihr irgendwelche Tipps?
Und das Problem mit dem abdriften beim Grade aus oder Rückwärts fliegen besteht weiterhin auch nach mehrfacher sehr genauer Kalibrierung mit Wasserwaage. Bin leicht am verzweifeln

Danke
Leander
Re: CX-20 Steuerung ist ungenau
Verfasst: 22:43 ,Mo 4. Sep 2017,
von doelle4
Abdriften in GPS Flugmodes passiert meistens durch eine Kompassabweichung, diese hat nichts mit der Lage zu tun (Wasserwage)
Daher Kompass ev neukalibrieren.
Probier hier mal die Yaw Rate zu senken:
Siehe Yaw Tuning:
http://ardupilot.org/copter/docs/tuning ... tch-tuning
Wenn das aber nur in Flugmodes ohne GPS sein soll z.b. auch Stabilize würde ich statdessen den "ACRO_YAW_P" Parameter anpassen
ACRO_YAW_P controls how quickly copter rotates based on a pilot’s yaw input. The default of 4.5 commands a 200 deg/sec rate of rotation when the yaw stick is held fully left or right. Higher values will make it rotate more quickly.
Sieh Parameteranpassungen (Stabilize Mode) :
http://ardupilot.org/copter/docs/stabilize-mode.html
Gruß Hans
Re: CX-20 Steuerung ist ungenau
Verfasst: 15:24 ,Di 5. Sep 2017,
von Surmana
Vielen Dank für die Rückmeldung.
Das mit dem Yaw werde ich nun ausprobieren und mich dann zurückmelden.
Zum Abdriften: Im Loiter-Modus hält der Kopter seine Position PERFEKT auch bei Wind treibt er nicht ab. Es geht um die Bewegungen nach Vorne und Hinten. (Rechter Stick ganz nach Vorne oder Hinten.) Dabei gleitet er leicht ab und somit ist ein gerader Flug nicht möglich. Praxis beispiel: Ich habe ein Objekt vor mir, welches ich filme. Ich möchte mich nun davon entfernen in einer geraden Line (Objekt immer noch in der Mitte). Leider driftet der Kopter dabei ab und die Linie ist eher ein Bogen und das Objekt ist nach 100m nicht mehr im Bild.
Ich denke meine Kompasskalibrierung ist gut, da RTH und der Loiter ja bis auf dieses Manko funktionieren.
Ich hoffe habe es so etwas besser erklärt.
Re: CX-20 Steuerung ist ungenau
Verfasst: 17:49 ,Di 5. Sep 2017,
von doelle4
Wenn er bei RTH eine halbwegs vernünftige gerade Linie fliegt ohne hin und wieder leicht nachlenken zu müssen dann ist Kompasseinstellung perfekt. Das ist übrigens der beste Test um die Kompass Kalibrierung zu überprüfen.
Da dies auch in Stabilize Mode ist scheidet Kompass sowiso aus.
Ich vermute mal das dein Kopter sich gering in der Luft dreht (Yaw) und daher dann leichten Bogen macht.
Würde mal andere Props draufgeben und probieren. Das ist das einfachere.
Erst dannach würde ich die ESC neu kalibrieren da das doch ein Aufwand ist.
Grund: Hat ein Prop etwas mehr Laufwiderstand wie ein anderer (Drehmoment) dann dreht sich das Ding in der Luft.Yaw Drehbewegung wird z.b. so gemacht das 2 diagonal gegenüberliegende Props eine kleine Spur langsamer oder schneller laufen wie die anderen 2.
Dann dreht sich das Ding in die jeweilige Richtung.
Stell ihn mal mal in Stabilize Mode in ein paar Metern Höhe in die Luft auf und gucke ob er sich leicht dreht. Wenn nicht dann scheiden Props und ESC Kalibrieren aus.
Bloss kann man da von der Ferne wenig dazu sagen da man den Rest nicht weiss oder sieht (Video?).
Gruß Hans
Re: CX-20 Steuerung ist ungenau
Verfasst: 00:23 ,Mo 18. Sep 2017,
von Surmana
Hey,
nach längerer Regen und Gewitter Zeit war es mir nun endlich möglich mich wieder mit meinem Kopter zu beschäftigen.
Ich habe mehrere Sachen ausprobiert und kann nun einiges ausschließen. Ich habe unterschiedliche Props ausprobiert darunter auch neue. Bei allen trat der selbe Fehler auf. Daher kann es nicht an diesen liegen.
Ich habe mehrere RTHs durchgeführt und alle waren in einer geraden Linie ohne nachzulenken ---> gute Kompasskalibrierung.
Eine Drehung beim Schweben also ein Yaw wie von "doelle4" vermutet konnte ich nicht feststellen. Die Ausrichtung bleibt unverändert.
Mir ist aufgefallen, dass das abdriften wie von mir beschrieben nur beim Rückwärts fliegen auftritt, NICHT beim Vorwärts fliegen wie ich fälschlicherweise weiter oben behauptete.
Woran genau kann das liegen?
Danke
Re: CX-20 Steuerung ist ungenau
Verfasst: 00:56 ,Mo 18. Sep 2017,
von Wolle Can Fly
Hi Surmana,
"" Mir ist aufgefallen, dass das abdriften wie von mir beschrieben nur beim Rückwärts fliegen auftritt, ""
Stimmt die Gewichtsverteilung (Schwerpunkt) ?
Re: CX-20 Steuerung ist ungenau
Verfasst: 09:44 ,Mo 18. Sep 2017,
von Kay Hawaii
Ist die Funke vielleicht nicht kalibriert? Das würde ich sonst nochmal probieren.
Gesendet von iPhone mit Tapatalk
Re: CX-20 Steuerung ist ungenau
Verfasst: 14:57 ,Mo 18. Sep 2017,
von DeWe
Wenn du im MP siehst, das für einen oder anderen Kanal die Mittelwerte je Richtung (in deinem Fall Vorwärts /Rückwärts) unterschiedlich sind, kann man auch die Dead zone entsprechend erhöhen
e. It may help to increase the deadzone on the RC input by increasing RC1_DZ, RC2_DZ, RC3_DZ and RC4_DZ