Hallo,
da mein Copter im Mission Planner nicht einstellbar war, (Horizont und Höhe waren nach Kalibrierung o.k., aber nach Ausschalten und erneuten Einschalten wieder total daneben)
Möchte ich den Copter nun (wie z.B. meinen Syma X8C) ohne GPS und Kompass fliegen.Habe daher beides ausgebaut.
Jetzt kommt mein Problem. Die Motoren laufen zwar an, sind aber in der Drehzahl nicht veränderbar. Reagieren also nicht auf den Steuerknüppel.
Einstellungen in der Software habe ich bisher keine vorgenommen. (Vers. 3.2.1)
Hat jemand einen Rat für mich?
Danke im voraus!
cx-20 open source ohne GPS und Kompass fliegen
- Fettbäuchlein
- Newbie
- Wohnort:: Siegerland / NRW
- Kopter & Zubehör: Thypon H
Q500
DJI Pahntom 4
DJI Phantom 3 Proff.
CX 20 Big Shark
CX 20 o.s.
einiges an Kleincopter - Hat sich bedankt: 2 Mal
- Danksagung erhalten: 0

Beitrag
Re: cx-20 open source ohne GPS und Kompass fliegen
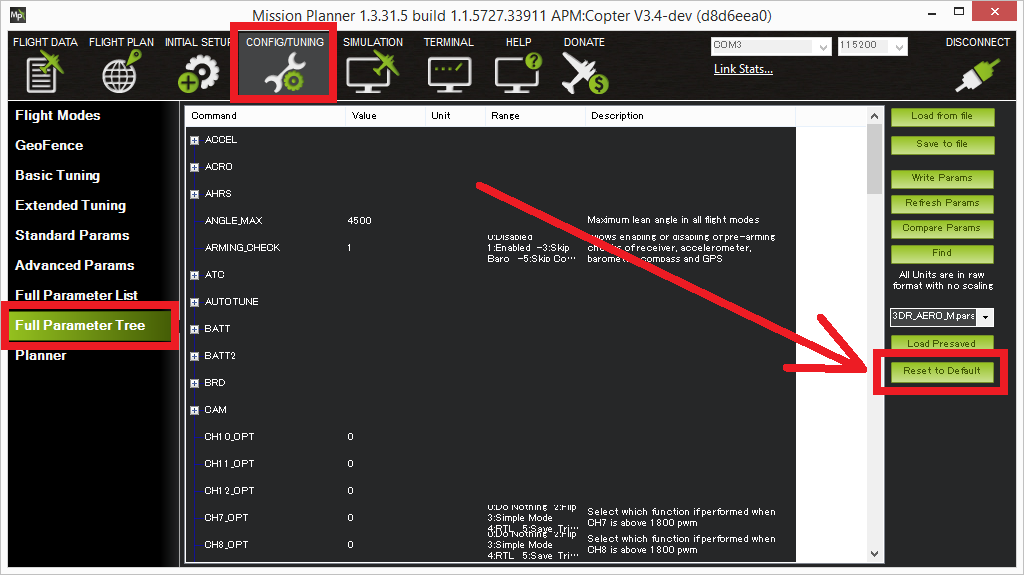
Wenn der APM mal richtig spinnt, hat ein Factory Reset der Settings immer geholfen (Parameter Tree), Settings wieder einspielen und die Kalibrierung noch einmal durchlaufen (Accelerometer, Kompass und Funke)
- Folgende Benutzer bedankten sich beim Autor DeWe für den Beitrag:
- Fettbäuchlein (12:39 ,Fr 11. Aug 2017,)
- Bewertung: 5%
Gruß Dirk
-
doelle4

- Inventar
- Kontaktdaten:
- Wohnort:: A-3900 Kleinreichenbach
- Kopter & Zubehör: Cheerson CX20, Mobius Gimbal, FPV, Karbon Beine. CX-21, Syma X5C ,Zerotech Dobby, Eachine Falcon 180 und andere
- Hat sich bedankt: 251 Mal
- Danksagung erhalten: 851 Mal
Beitrag
Re: cx-20 open source ohne GPS und Kompass fliegen
Parameter auch vorher mit Mausklick in den Kopter gespeichert ?
Der 3. Button von oben , write Params
Hast du nach dem Kalibrieren auch die Verbindung per Mausklick beendet und nicht nur USB abgesteckt?
Deine Sache ist ein Einzelfall und bisher nicht bekannt. Vermute Ursache bei vorigen das Problem..
Zu Betrieb ohne Kompass und GPS: Das macht jeder CX-20 im Stabilize Mode wenn kein Haken bei Simple oder Super Simple Mode gesetzt wurde.
Ausbauen finde ich da nicht angemessen, da es an den Settings liegt.
Daher wirds ev. auch das Problem rühren "
Gruß Hans
Der 3. Button von oben , write Params
Hast du nach dem Kalibrieren auch die Verbindung per Mausklick beendet und nicht nur USB abgesteckt?
Deine Sache ist ein Einzelfall und bisher nicht bekannt. Vermute Ursache bei vorigen das Problem..
Zu Betrieb ohne Kompass und GPS: Das macht jeder CX-20 im Stabilize Mode wenn kein Haken bei Simple oder Super Simple Mode gesetzt wurde.
Ausbauen finde ich da nicht angemessen, da es an den Settings liegt.
Daher wirds ev. auch das Problem rühren "
" da ev in Failsafe ist da die Teile ausgebaut wurdenDie Motoren laufen zwar an, sind aber in der Drehzahl nicht veränderbar. Reagieren also nicht auf den Steuerknüppel.
Gruß Hans
- Folgende Benutzer bedankten sich beim Autor doelle4 für den Beitrag:
- Fettbäuchlein (12:40 ,Fr 11. Aug 2017,)
- Bewertung: 5%
- Fettbäuchlein
- Newbie
- Wohnort:: Siegerland / NRW
- Kopter & Zubehör: Thypon H
Q500
DJI Pahntom 4
DJI Phantom 3 Proff.
CX 20 Big Shark
CX 20 o.s.
einiges an Kleincopter - Hat sich bedankt: 2 Mal
- Danksagung erhalten: 0
Beitrag
Re: cx-20 open source ohne GPS und Kompass fliegen
Hallo und recht herzlichen Dank für die schnelle Hilfe!!!
Habe den Kompass und GPS erstmal provisorisch mit doppelseitigen Klebeband wieder angebracht.
Danach wie vorgeschlagen den Reset durchgeführt. Eine tolle Erleichterung von Hans, hier ein Bild dazu einzustellen.
Danach war eine dauerhafte Kalibrierung wieder möglich und
die Motoren sind in der Drehzahlveränderung wieder ansprechbar.
Leider regnet es Bindfäden, so daß ein Testflug noch warten muß.

Habe den Kompass und GPS erstmal provisorisch mit doppelseitigen Klebeband wieder angebracht.
Danach wie vorgeschlagen den Reset durchgeführt. Eine tolle Erleichterung von Hans, hier ein Bild dazu einzustellen.
Danach war eine dauerhafte Kalibrierung wieder möglich und
die Motoren sind in der Drehzahlveränderung wieder ansprechbar.
Leider regnet es Bindfäden, so daß ein Testflug noch warten muß.
-
doelle4
- Inventar
- Kontaktdaten:
- Wohnort:: A-3900 Kleinreichenbach
- Kopter & Zubehör: Cheerson CX20, Mobius Gimbal, FPV, Karbon Beine. CX-21, Syma X5C ,Zerotech Dobby, Eachine Falcon 180 und andere
- Hat sich bedankt: 251 Mal
- Danksagung erhalten: 851 Mal
Beitrag
Re: cx-20 open source ohne GPS und Kompass fliegen
Die Kompassdaten der Kalibrierung werden in die Parameter geschreiben und müssen dann fix im APM gespeichert werden.
Daher bei jeder Änderung Params speichern wählen und dann erst die Verb indung mit Mausklick beenden.
Zieht man nur Kabel ab kann (muss nicht) der FC einen Fehler abbgekommen wo er erst nach Reset wieder klar läuft.
Gruß Hans
Daher bei jeder Änderung Params speichern wählen und dann erst die Verb indung mit Mausklick beenden.
Zieht man nur Kabel ab kann (muss nicht) der FC einen Fehler abbgekommen wo er erst nach Reset wieder klar läuft.
Das ist nicht provisorisch sondern die erste Wahl wie man das machen sollte (vorrausgesetzt es wird ein gutes Band verwendet)Habe den Kompass und GPS erstmal provisorisch mit doppelseitigen Klebeband wieder angebracht.
Gruß Hans
- Fettbäuchlein
- Newbie
- Wohnort:: Siegerland / NRW
- Kopter & Zubehör: Thypon H
Q500
DJI Pahntom 4
DJI Phantom 3 Proff.
CX 20 Big Shark
CX 20 o.s.
einiges an Kleincopter - Hat sich bedankt: 2 Mal
- Danksagung erhalten: 0
Beitrag
Re: cx-20 open source ohne GPS und Kompass fliegen
Hallo,
heute konnte in einer kurzen Regenpause der Testflug stattfinden.
Dank Eurer Hilfe (am wichtigsten war wohl der Reset des FC), fliegt der Copter
nun gehorsam wie ein Lämmchen!!
Habe vor dem Testflug noch eine neue Firmware (3.2. und die Original Parameter hier aus dem Forum)
aufgespielt und den Copter im Mission Planner neu kalibriert.
So wurde nun, aus einem geglaubten Ersatzteillager, wieder ein gut fliegender Copter!
Dann werde ich mich mal in den autonomen Flug einarbeiten.
Gruß Reinhard
heute konnte in einer kurzen Regenpause der Testflug stattfinden.
Dank Eurer Hilfe (am wichtigsten war wohl der Reset des FC), fliegt der Copter
nun gehorsam wie ein Lämmchen!!
Habe vor dem Testflug noch eine neue Firmware (3.2. und die Original Parameter hier aus dem Forum)
aufgespielt und den Copter im Mission Planner neu kalibriert.
So wurde nun, aus einem geglaubten Ersatzteillager, wieder ein gut fliegender Copter!
Dann werde ich mich mal in den autonomen Flug einarbeiten.
Gruß Reinhard



