Hallo allerseits,
melde mich mal wieder, und wollte mich nochmal für die vielen hilfreichen Infos in diesem Forum bedanken!
Aufgrund dieser haben wir uns nun entschieden 2 Stk. F450 Quads zum echten Komplettpreis von knapp 300€ pro Stück (inkl. Ladetechnik und 2 Akkus) zu ordern und die Teile sind zum Teil schon angekommen.
An dieser Stelle werde ich unsere Fortschritte dokumentieren um vielleicht auch anderen Anfängern ein wenig zu helfen!
Generell besteht unser System aus folgenden Komponenten:
Aliexpress:
F450 Komplettset (Frame, 30A SimonK ESC, Motore, Propeller, APM2.6 und diverse Stecker)
http://de.aliexpress.com/item/F450-Fram ... 04468.html
M8N GPS
http://de.aliexpress.com/item/Ublox-NEO ... 91354.html
LiPo Warner
http://de.aliexpress.com/item/1pcs-Hot- ... wVersion=2
Powermodul
http://de.aliexpress.com/item/APM-Power ... wVersion=2
Hobbyking:
Fernsteueranlage Turnigy 9x
Blaue Hintergrundbeleuchtung für Fernsteuerung
1500mAh LiFe Akku für Fernsteuerung
Turnigy Reaktor 250W Ladegerät
Turnigy Netzteil für Ladegerät
2 Stk. LiPo Turnigy 3S 5000mAh 25c
diverse Kleinteile wie Adapterstecker, Beleuchtung, Ersatzpropeller, Auwuchtgerät, etc.
Sowohl die Bestellungen bei HK International als auch bei HK EU waren in unter einer Woche im Haus!
Bisheriger Fortschritt:
In die Fernsteuerung wurde die Blaue Hintergrundbeleuchtung eingebaut, Kabel mit Stecker zum Flashen mit einer anderen Firmware eingelötet und ein bereits bei der Lieferung vom Poti abgerissenes Kabel wieder angelötet.
Das Flashen mit OpenTX via Companion hat ein wenig gedauert, da es immer Fehlermeldungen gab, wurde aber nach langem herumprobieren und umstellen in der Software auch erledigt!
Ebenfalls ist das Ladegerät bereits eingestellt und getestet (mit dem Senderakku)
Nun heisst es warten bis der Rest ankommt!
Lg
S
F450 Eigenbau
- Stefan_TR96
- Newbie
- Wohnort:: Baden
- Kopter & Zubehör: Syma X5SW
- Hat sich bedankt: 0
- Danksagung erhalten: 0
- Stefan_TR96
- Newbie
- Wohnort:: Baden
- Kopter & Zubehör: Syma X5SW
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
Kurzer Zwischenbericht ... es ist alles bis auf die GPS Module eingetroffen! Der erste Kopter ist fertig zusammengebaut und war gestern zum ersten mal in der Luft, ganz schön aggressiv das Teil 
Einzig ein ESC ist durchgebrannt (haben wohl beim Testen irgendwo einen Kurzschluss verursacht) aber neue gibts heute!
Fotos folgen!
Einzig ein ESC ist durchgebrannt (haben wohl beim Testen irgendwo einen Kurzschluss verursacht) aber neue gibts heute!
Fotos folgen!
-
Baumi

- Forumskönig
- Wohnort:: Sonsbeck
- Kopter & Zubehör: FrSky Horus X10S Express
Quanum Nova OS auf DJI Umbau
Syma-X5C
Mikado Logo 550SE
T-Rex 470 LM - Hat sich bedankt: 245 Mal
- Danksagung erhalten: 680 Mal
Beitrag
Re: F450 Eigenbau
Hallo.
Ein Bild sagt mehr als 1000 Worte
Lass doch mal was von dem guten Stück sehen.
Das mit dem ESC ist ärgerlich, mir aber bei meinem ersten Selbstaufbau auch so ergangen.
Many Greetz
Baumi
Gesendet von iPhone6 mit Tapatalk
Ein Bild sagt mehr als 1000 Worte
Lass doch mal was von dem guten Stück sehen.
Das mit dem ESC ist ärgerlich, mir aber bei meinem ersten Selbstaufbau auch so ergangen.
Many Greetz
Baumi
Gesendet von iPhone6 mit Tapatalk
Runter kommen sie immer 
- Stefan_TR96
- Newbie
- Wohnort:: Baden
- Kopter & Zubehör: Syma X5SW
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
Fotos folgen die Tage ... der erste war sozusagen das "Probierstück", der Aufbau vom 2. wird genauer dokumentiert
- Stefan_TR96
- Newbie
- Wohnort:: Baden
- Kopter & Zubehör: Syma X5SW
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
So, hier mal ein erstes Foto!
Der erste Kopter fliegt, obwohl noch kein GPS und Kompass verbaut sind, ganz annehmbar (soweit ich dies als Anfänger beurteilen kann).
Beim 2. gestern die FW mit MP aufgespielt und die neuen ESCs kalibiriert! Beim Startversuch beginnt sich der Kopter immer nach rechts um die eigene Achse zu drehen.
Pre Arm Checks sind bei beiden Koptern aufgrund des noch fehlenden GPS deaktiviert. Motordrehrichtungen und Propeller wurden mehrfach geprüft und passen!
Im Zuge des etwas frustgeplagten Probierens mit montierten Props hat der gestrige Abend dann im Krankenhaus mit einer Naht mit 4 Stichen im linken Handrücken geendet
Hat jemand eine Idee woran das drehen liegen kann? Ich tippe schwer auf den Kompass - beim 1. Kopter der ganz gut fliegt habe ich nämlich bei den ersten Gehversuchen mit der Software diverseste Sachen (GPS/Kompass/etc.) deaktiviert oder umgestellt und beim 2. Kopter, der jetzt Probleme macht, nur die Pre Arm Checks deaktiviert!
GPS scheint seit heute im Sendungstracking auf und sollte Anfang/Mitte nächster Woche eintreffen!
Der erste Kopter fliegt, obwohl noch kein GPS und Kompass verbaut sind, ganz annehmbar (soweit ich dies als Anfänger beurteilen kann).
Beim 2. gestern die FW mit MP aufgespielt und die neuen ESCs kalibiriert! Beim Startversuch beginnt sich der Kopter immer nach rechts um die eigene Achse zu drehen.
Pre Arm Checks sind bei beiden Koptern aufgrund des noch fehlenden GPS deaktiviert. Motordrehrichtungen und Propeller wurden mehrfach geprüft und passen!
Im Zuge des etwas frustgeplagten Probierens mit montierten Props hat der gestrige Abend dann im Krankenhaus mit einer Naht mit 4 Stichen im linken Handrücken geendet
Hat jemand eine Idee woran das drehen liegen kann? Ich tippe schwer auf den Kompass - beim 1. Kopter der ganz gut fliegt habe ich nämlich bei den ersten Gehversuchen mit der Software diverseste Sachen (GPS/Kompass/etc.) deaktiviert oder umgestellt und beim 2. Kopter, der jetzt Probleme macht, nur die Pre Arm Checks deaktiviert!
GPS scheint seit heute im Sendungstracking auf und sollte Anfang/Mitte nächster Woche eintreffen!
- Dateianhänge
-
- Stefan_TR96
- Newbie
- Wohnort:: Baden
- Kopter & Zubehör: Syma X5SW
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
So, jetzt gibts wieder einen Bericht über den Fortschritt und ein paar Fragen/Probleme die sich aufgetan haben:
GPS (M8N) ist am Dienstag eingetroffen und an beiden Koptern verbaut! Der Kompass wurde in MP kalibriert und auch die Kalibrierung mit laufenden Motoren (Am Boden fixiert und die Propeller verkehrt montiert).
Accel Kalibrierung wurde exakt durchgeführt.
FailSafes sind eingestellt!
Dann gings raus aufs freie Feld (bisschen böhiger Wind) und es wurde folgendes getestet und untenstehende Probleme traten auf:
Start und ein bisschen Fliegen im Stabilize -> funktioniert ganz gut, Kopter driftet ein wenig aber das lässt sich sicher mit dem Trim (Save Trim oder Auto Trim) an einem windstilleren Tag in den Griff bekommen!
Umschalten in den AltHold Modus -> Kopter hält anfangs die Höhe recht schön (ca 10 bis 20cm Differenz nach oben und unten). Nach kurzer Zeit macht er große (paar m) Sprünge meist in Richtung Boden und fängt sich dann teilweise wieder und hält kurz die Höhe. Durch umschalten in den Stabilize konnte ich Ihn immer noch abfangen und einen Crash verhindern. Beim Abermaligen zurückschalten geht der zuvor beschriebene Ablauf von vorne los!
Der Schaumstoff überm Baro im APM sitzt an der richtigen Stelle.
Was mir noch aufgefallen ist - Bei den Flight Datas im MP steigt die Altitude in m kontinuierlich über die Zeit an wenn der Kopter im geschlossenen Raum am Boden steht. Der Press_abs liegt konstant bei 986,78 mbar, der press_temp bei 2595 ?? kann das stimmen bzw. mit dem Problem beim Höhe halten zu tun haben?
IMU Werte wurden mitgeloggt.
Umschalten in den Loiter Modus -> Position wird recht gut gehalten, Höhe schwankt ab und zu ein bisschen! Wenn der Kopter gegen Windböhen zu kämpfen hat, beginnt er sich aufzuschaukeln bis er manchmal ins trudeln gerät und unkontrolliert Richtung Boden sauste - konnte ihn immer rechtzeitig im Stabilize abfangen und sicher landen!
Autotune -> In der Annahme die Probleme zu verbessern habe ich dann Autotune versucht. Also im Stabilize auf ca 10m Höhe gegangen, in den Alt Hold geschaltet und Autotune aktiviert. Der Kopter hat darauf hin begonnen seinen Tanz nach rechts/links bzw. danach vorne/hinten durchzuführen. Wenn er (wahrscheinlich auch durch den Wind) weg gedriftet ist habe ich einfach mit den Steuerknüppeln gegengesteuert und er hat weiter gemacht wie zuvor. Wenn er an Höhe verloren hat und so im 2m Bereich vom Boden entfernt war habe ich immer in Stabilize und Autotune aus geschaltet und den Kopter wieder auf Höhe gebracht. Dann Autotune wieder aktiviert und er hat sein Programm fortgesetzt. Als er dann fertig war und ruhig in der Luft stand bzw. nicht mehr wippte Autotune auf aus, dann wieder ein, gelandet und disarmed. Autotune auf aus. Ein weiteres Armen wurde anscheinend durch den Akkustand Failsafe (Power Module ist auf 10,5V gestellt und mit dem Multimeter kalibriert) verhindert.
Also erstmal nach Hause Akkus laden. Mit vollem Akku dann ein weiterer Versuch. Im Stabilize gestartet und irgendwie fliegt sich die Kiste komisch. im Loiter (bzw. beim abermalig versuchten Autotune) scheint es, als wippe er nicht um die X/Y Achse sondern immer im 45 grad Winkel zu diesen.
GPS ist im Dome auf dem beigelegten Halter montiert. Dieser lässt sich minimal (3-5 Grad schätze ich) verdrehen.
Der Log Analyzer zeigt keine Auffälligkeiten! Das Log Review zeigt folgendes:
IMU.GyrX liegt im Mittel im Bereich von -2 bis +2, über ca. 10 min Flugzeit gab es Ausschläge bis +12 im Extremsten
IMU.GyrY nahezu identisch
GyrZ +/- 0,2 bis 0,3 mit einigen Ausreissern bis auf -10
IMU.AccelX -> +/-15
IMU.AccelY -> detto
IMU.AccelZ -> +/-25
Gerne kann ich das LogFile auch hier hochladen! Wäre für Ratschläge dankbar!
Kann ich die originalen PID Werte irgendwie wieder aufspielen ohne alles neu kalibrieren zu müssen? Hab natürlich vorher nichts gesichert! Oder gibt es irgendwo eine Auflistung der Werte um sie manuell einzuspielen? Hab leider keine Ahnung welche Werte Autotune ändert!
Lg Stefan
GPS (M8N) ist am Dienstag eingetroffen und an beiden Koptern verbaut! Der Kompass wurde in MP kalibriert und auch die Kalibrierung mit laufenden Motoren (Am Boden fixiert und die Propeller verkehrt montiert).
Accel Kalibrierung wurde exakt durchgeführt.
FailSafes sind eingestellt!
Dann gings raus aufs freie Feld (bisschen böhiger Wind) und es wurde folgendes getestet und untenstehende Probleme traten auf:
Start und ein bisschen Fliegen im Stabilize -> funktioniert ganz gut, Kopter driftet ein wenig aber das lässt sich sicher mit dem Trim (Save Trim oder Auto Trim) an einem windstilleren Tag in den Griff bekommen!
Umschalten in den AltHold Modus -> Kopter hält anfangs die Höhe recht schön (ca 10 bis 20cm Differenz nach oben und unten). Nach kurzer Zeit macht er große (paar m) Sprünge meist in Richtung Boden und fängt sich dann teilweise wieder und hält kurz die Höhe. Durch umschalten in den Stabilize konnte ich Ihn immer noch abfangen und einen Crash verhindern. Beim Abermaligen zurückschalten geht der zuvor beschriebene Ablauf von vorne los!
Der Schaumstoff überm Baro im APM sitzt an der richtigen Stelle.
Was mir noch aufgefallen ist - Bei den Flight Datas im MP steigt die Altitude in m kontinuierlich über die Zeit an wenn der Kopter im geschlossenen Raum am Boden steht. Der Press_abs liegt konstant bei 986,78 mbar, der press_temp bei 2595 ?? kann das stimmen bzw. mit dem Problem beim Höhe halten zu tun haben?
IMU Werte wurden mitgeloggt.
Umschalten in den Loiter Modus -> Position wird recht gut gehalten, Höhe schwankt ab und zu ein bisschen! Wenn der Kopter gegen Windböhen zu kämpfen hat, beginnt er sich aufzuschaukeln bis er manchmal ins trudeln gerät und unkontrolliert Richtung Boden sauste - konnte ihn immer rechtzeitig im Stabilize abfangen und sicher landen!
Autotune -> In der Annahme die Probleme zu verbessern habe ich dann Autotune versucht. Also im Stabilize auf ca 10m Höhe gegangen, in den Alt Hold geschaltet und Autotune aktiviert. Der Kopter hat darauf hin begonnen seinen Tanz nach rechts/links bzw. danach vorne/hinten durchzuführen. Wenn er (wahrscheinlich auch durch den Wind) weg gedriftet ist habe ich einfach mit den Steuerknüppeln gegengesteuert und er hat weiter gemacht wie zuvor. Wenn er an Höhe verloren hat und so im 2m Bereich vom Boden entfernt war habe ich immer in Stabilize und Autotune aus geschaltet und den Kopter wieder auf Höhe gebracht. Dann Autotune wieder aktiviert und er hat sein Programm fortgesetzt. Als er dann fertig war und ruhig in der Luft stand bzw. nicht mehr wippte Autotune auf aus, dann wieder ein, gelandet und disarmed. Autotune auf aus. Ein weiteres Armen wurde anscheinend durch den Akkustand Failsafe (Power Module ist auf 10,5V gestellt und mit dem Multimeter kalibriert) verhindert.
Also erstmal nach Hause Akkus laden. Mit vollem Akku dann ein weiterer Versuch. Im Stabilize gestartet und irgendwie fliegt sich die Kiste komisch. im Loiter (bzw. beim abermalig versuchten Autotune) scheint es, als wippe er nicht um die X/Y Achse sondern immer im 45 grad Winkel zu diesen.
GPS ist im Dome auf dem beigelegten Halter montiert. Dieser lässt sich minimal (3-5 Grad schätze ich) verdrehen.
Der Log Analyzer zeigt keine Auffälligkeiten! Das Log Review zeigt folgendes:
IMU.GyrX liegt im Mittel im Bereich von -2 bis +2, über ca. 10 min Flugzeit gab es Ausschläge bis +12 im Extremsten
IMU.GyrY nahezu identisch
GyrZ +/- 0,2 bis 0,3 mit einigen Ausreissern bis auf -10
IMU.AccelX -> +/-15
IMU.AccelY -> detto
IMU.AccelZ -> +/-25
Gerne kann ich das LogFile auch hier hochladen! Wäre für Ratschläge dankbar!
Kann ich die originalen PID Werte irgendwie wieder aufspielen ohne alles neu kalibrieren zu müssen? Hab natürlich vorher nichts gesichert! Oder gibt es irgendwo eine Auflistung der Werte um sie manuell einzuspielen? Hab leider keine Ahnung welche Werte Autotune ändert!
Lg Stefan
-
mastersurferde

- Forumskönig
- Wohnort:: Bayern
- Hat sich bedankt: 52 Mal
- Danksagung erhalten: 294 Mal
Beitrag
Re: F450 Eigenbau
Hi,
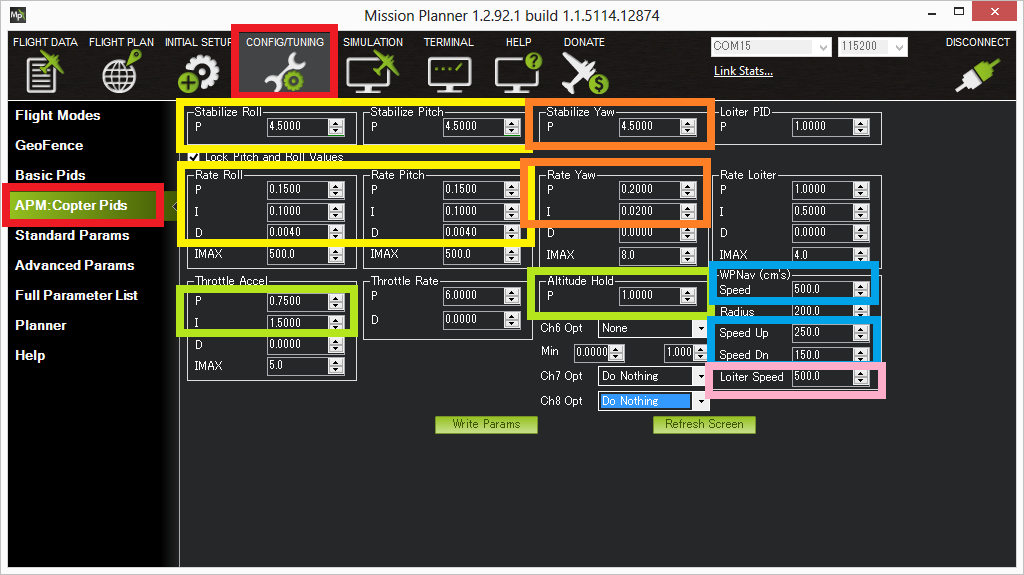
so sehen die Standarteinstellungen aus:
http://ardupilot.org/copter/_images/Tun ... Change.png
Autotune verändert nur die gelb umrandeten Werte.
Ich glaub allerdings, dass Dein Kopter damit zu zappelig sein wird.
Probier mal für Pitch und Roll:
P: 0,11
I: 0,10
D 0,004
Erst wenn er im Stabilize wirklich gut fliegt, dann kannst Du dich ans AltHold Tuning machen.
Wenns möglich ist, dann versuche nochmals ein komplettes Autotune durchlaufen zu lassen, speichere die Werte ab und stell sie mal hier rein.
Noch eine ganz blöde Frage: Die Bierkistenkalibrierung hast Du schon ordentlich durchgeführt?
Gruß
Stefan
so sehen die Standarteinstellungen aus:
http://ardupilot.org/copter/_images/Tun ... Change.png
{kind=link}
Autotune verändert nur die gelb umrandeten Werte.
Ich glaub allerdings, dass Dein Kopter damit zu zappelig sein wird.
Probier mal für Pitch und Roll:
P: 0,11
I: 0,10
D 0,004
Erst wenn er im Stabilize wirklich gut fliegt, dann kannst Du dich ans AltHold Tuning machen.
Wenns möglich ist, dann versuche nochmals ein komplettes Autotune durchlaufen zu lassen, speichere die Werte ab und stell sie mal hier rein.
Noch eine ganz blöde Frage: Die Bierkistenkalibrierung hast Du schon ordentlich durchgeführt?
Gruß
Stefan
- Stefan_TR96
- Newbie
- Wohnort:: Baden
- Kopter & Zubehör: Syma X5SW
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
Danke mal für die Infos!
Habe heute mal die Parameter auf Standard bzw. auf die von dir vorgeschlagenen Werte geändert!
Aufgrund böhigen Windes ist der Test- bzw. Autotune Flug mal verschoben!
Ich berichte sobald es neues gibt
Habe heute mal die Parameter auf Standard bzw. auf die von dir vorgeschlagenen Werte geändert!
Aufgrund böhigen Windes ist der Test- bzw. Autotune Flug mal verschoben!
Ich berichte sobald es neues gibt
- Fentermichel
- Newbie
- Wohnort:: Lippspringe
- Kopter & Zubehör: F450 X8 Pixhawk
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
Hallo,
ich habe gerade deinen Bericht gelesen.
Ich habe bei meinen F450 X8 das gleiche Problem wie du im Loiter, er schauckelt sich im Wind auf.
Welche werte sind dafür zuständig?
Bis dann
ich habe gerade deinen Bericht gelesen.
Ich habe bei meinen F450 X8 das gleiche Problem wie du im Loiter, er schauckelt sich im Wind auf.
Welche werte sind dafür zuständig?
Bis dann
-
mastersurferde
- Forumskönig
- Wohnort:: Bayern
- Hat sich bedankt: 52 Mal
- Danksagung erhalten: 294 Mal
Beitrag
Re: F450 Eigenbau
Hi,
da brauchts mehr Input.
Welche Motoren, welche Props, welcher Akku, Gewicht, Bilder, Flightcontroller (Firmware).
Screenshot vom Extended Tuning.
Was hast Du schon alles probiert und verstellt?
Gruß
Stefan
da brauchts mehr Input.
Welche Motoren, welche Props, welcher Akku, Gewicht, Bilder, Flightcontroller (Firmware).
Screenshot vom Extended Tuning.
Was hast Du schon alles probiert und verstellt?
Gruß
Stefan
- Fentermichel
- Newbie
- Wohnort:: Lippspringe
- Kopter & Zubehör: F450 X8 Pixhawk
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
Hi,
entschuldige, das ich auf deine schnelle antwort erst jetzt reagiere.
Motoren sind Emax 2213 935KV mit 10 x 45 Propeller.
Akkus sind 3x S3 5200mah parallel.
Gewicht 2,6kg
Pixhawk Klon Fixhawk mit Apm Copter V3.3.2
Ich habe den Rate Loiter P (VEL_XY_P) auf Kanal 6 gelegt konnte aber keine Besserung bei unterschiedlichen Einstellungen feststellen.
Es ist aber auch schwierig zu reproduzieren. Der Wind ist ja nicht nimmer gleich,
Bis dann Konrad
entschuldige, das ich auf deine schnelle antwort erst jetzt reagiere.
Motoren sind Emax 2213 935KV mit 10 x 45 Propeller.
Akkus sind 3x S3 5200mah parallel.
Gewicht 2,6kg
Pixhawk Klon Fixhawk mit Apm Copter V3.3.2
Ich habe den Rate Loiter P (VEL_XY_P) auf Kanal 6 gelegt konnte aber keine Besserung bei unterschiedlichen Einstellungen feststellen.
Es ist aber auch schwierig zu reproduzieren. Der Wind ist ja nicht nimmer gleich,
Bis dann Konrad
- Dateianhänge
-
-
-
mastersurferde
- Forumskönig
- Wohnort:: Bayern
- Hat sich bedankt: 52 Mal
- Danksagung erhalten: 294 Mal
Beitrag
Re: F450 Eigenbau
Nimm mal Rate Roll P und Rate Roll R von 0,250 auf die hälfte runter und schau, ob´s besser ist.
Gruß
Stefan
Gruß
Stefan
- Fentermichel
- Newbie
- Wohnort:: Lippspringe
- Kopter & Zubehör: F450 X8 Pixhawk
- Hat sich bedankt: 0
- Danksagung erhalten: 0
-
mastersurferde
- Forumskönig
- Wohnort:: Bayern
- Hat sich bedankt: 52 Mal
- Danksagung erhalten: 294 Mal
- Fentermichel
- Newbie
- Wohnort:: Lippspringe
- Kopter & Zubehör: F450 X8 Pixhawk
- Hat sich bedankt: 0
- Danksagung erhalten: 0
Beitrag
Re: F450 Eigenbau
Hallo,
da ich beruflich etwas gefordert war, kann ich erst jetzt antworten.
Das halbieren von Rate Roll P und Rate Pitch P führte nicht zum Erfolg.
Ich habe dann Rate Roll P und Rate Pitch P noch etwas auf 0,3 erhöht.
Außerdem habe ich Rate Roll I und Rate Pitch I auf 0,2 verdoppelt
und Rate Roll D und Rate Pitch D auf 0,01 mehr als verdoppelt.
Er schaukelt sich jetzt nicht mehr auf und fliegt ganz gut.
Allerdings verliert er in AltHold und PositionHold im Flug an Höhe, die er erst wieder an nimmt wenn man stoppt.
Power hat er eigentlich genug. In Stabilize Modus kann ich schneller fliegen und noch steigen.
verändern von Höhe halten P brachte keinen Erfolg.
In PositionHold bewegt er sich in ein 3m Fenster.
Er hat ein M8N xl GPS, da sollte er doch eigentlich seine Position besser halten.
Vielleicht hat einer ja noch eine Idee, was ich noch ändern muss.
Hier meine Einstellung.
Bis dann Konrad
da ich beruflich etwas gefordert war, kann ich erst jetzt antworten.
Das halbieren von Rate Roll P und Rate Pitch P führte nicht zum Erfolg.
Ich habe dann Rate Roll P und Rate Pitch P noch etwas auf 0,3 erhöht.
Außerdem habe ich Rate Roll I und Rate Pitch I auf 0,2 verdoppelt
und Rate Roll D und Rate Pitch D auf 0,01 mehr als verdoppelt.
Er schaukelt sich jetzt nicht mehr auf und fliegt ganz gut.
Allerdings verliert er in AltHold und PositionHold im Flug an Höhe, die er erst wieder an nimmt wenn man stoppt.
Power hat er eigentlich genug. In Stabilize Modus kann ich schneller fliegen und noch steigen.
verändern von Höhe halten P brachte keinen Erfolg.
In PositionHold bewegt er sich in ein 3m Fenster.
Er hat ein M8N xl GPS, da sollte er doch eigentlich seine Position besser halten.
Vielleicht hat einer ja noch eine Idee, was ich noch ändern muss.
Hier meine Einstellung.



