Danke Dir,
das sieht ja gar nicht so arg durcheinander aus. Bei einem Absturz fliegt bei dem Vogel recht schnell der Deckel davon. Vorne am Deckel hab ich normalerweise so kleine Mini-Magnete reingeklebt, damit das auch zu bleibt.
Welcher FC ist das genau?
Gruß
Stefan
Zeta Wing Wing Z-84 RC Modell
-
mastersurferde

- Forumskönig
- Wohnort:: Bayern
- Hat sich bedankt: 52 Mal
- Danksagung erhalten: 294 Mal
- wkhard
- Newbie
- Wohnort:: Hard, AT
- Kopter & Zubehör: Pixhawk Hexa, Pixhawk Tri, diverse Quads, Diverse Bikopter (helis)
- Hat sich bedankt: 2 Mal
- Danksagung erhalten: 2 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Hallo Stefan,
Der FC ist ein Race 32
https://hobbyking.com/en_us/race-32-mic ... eluxe.html
Den Deckel schliesse ich mit einem Gummiband, unten am Rumpf angeklebt.
Grüsse
Kurt
Der FC ist ein Race 32
https://hobbyking.com/en_us/race-32-mic ... eluxe.html
Den Deckel schliesse ich mit einem Gummiband, unten am Rumpf angeklebt.
Grüsse
Kurt
-
doelle4

- Inventar
- Kontaktdaten:
- Wohnort:: A-3900 Kleinreichenbach
- Kopter & Zubehör: Cheerson CX20, Mobius Gimbal, FPV, Karbon Beine. CX-21, Syma X5C ,Zerotech Dobby, Eachine Falcon 180 und andere
- Hat sich bedankt: 246 Mal
- Danksagung erhalten: 842 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Ich hab da mal ne Frage zur APM Verkabelung.
Da mein Mini APM keinen Kompass intern hat wie ich vor Wochen bemerkte und mein kleines GPS vom Racer auch keinen hat habe ich ihn bisher noch nicht eingebaut denn ohne Kompass macht das keinen Sinn und hatte ihn direkt Empfänger zu Servos/ESC verkabelt
Nun will ich aber endlich anfangen mit dem APM Einbau.
Bloss: Wie sind die Anschlüsse der 2 Ruder die ja Flaps genannt werden.
Auf welchen APM Ausgängen hängen die?
Der Motor wird ja nehm ich mal an auf M1 angesteuert aber die 2 Servos?
Müssten die Ausgangskanäle A1 und A2 sein oder?
Wär nicht schlecht wenn mir da wer helfen könnte.
Das Ding wird verflucht eng mit Powermodul, APM, GPS, ESC, Empfänger ,Transmitter und dem Kabelzeug. Muss den Platz optimal nützen damit die Stecker noch zugänglich sind und der Seitenanstand gegeben ist.
Verklebe die Teile mit kleinen Batzen PU Schaum aus der Pistole der Prima bei Styropor ist und da sollte die anordnung auf anhieb passen
Gruß Hans
Da mein Mini APM keinen Kompass intern hat wie ich vor Wochen bemerkte und mein kleines GPS vom Racer auch keinen hat habe ich ihn bisher noch nicht eingebaut denn ohne Kompass macht das keinen Sinn und hatte ihn direkt Empfänger zu Servos/ESC verkabelt
Nun will ich aber endlich anfangen mit dem APM Einbau.
Bloss: Wie sind die Anschlüsse der 2 Ruder die ja Flaps genannt werden.
Auf welchen APM Ausgängen hängen die?
Der Motor wird ja nehm ich mal an auf M1 angesteuert aber die 2 Servos?
Müssten die Ausgangskanäle A1 und A2 sein oder?
Wär nicht schlecht wenn mir da wer helfen könnte.
Das Ding wird verflucht eng mit Powermodul, APM, GPS, ESC, Empfänger ,Transmitter und dem Kabelzeug. Muss den Platz optimal nützen damit die Stecker noch zugänglich sind und der Seitenanstand gegeben ist.
Verklebe die Teile mit kleinen Batzen PU Schaum aus der Pistole der Prima bei Styropor ist und da sollte die anordnung auf anhieb passen
Gruß Hans
-
Wolle Can Fly

- Forumskönig
- Wohnort:: Saarland
- Kopter & Zubehör: CX-20 Cheerson, Spektrum DX9 + DX18. FPV, Telemetrie, diverse Hexas und Quads, Trucks elektrisch und Methanol, Segler, Motorflieger elektrisch u. Verbrenner, DJI-Mini 2
- Hat sich bedankt: 763 Mal
- Danksagung erhalten: 765 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Moin Hans,
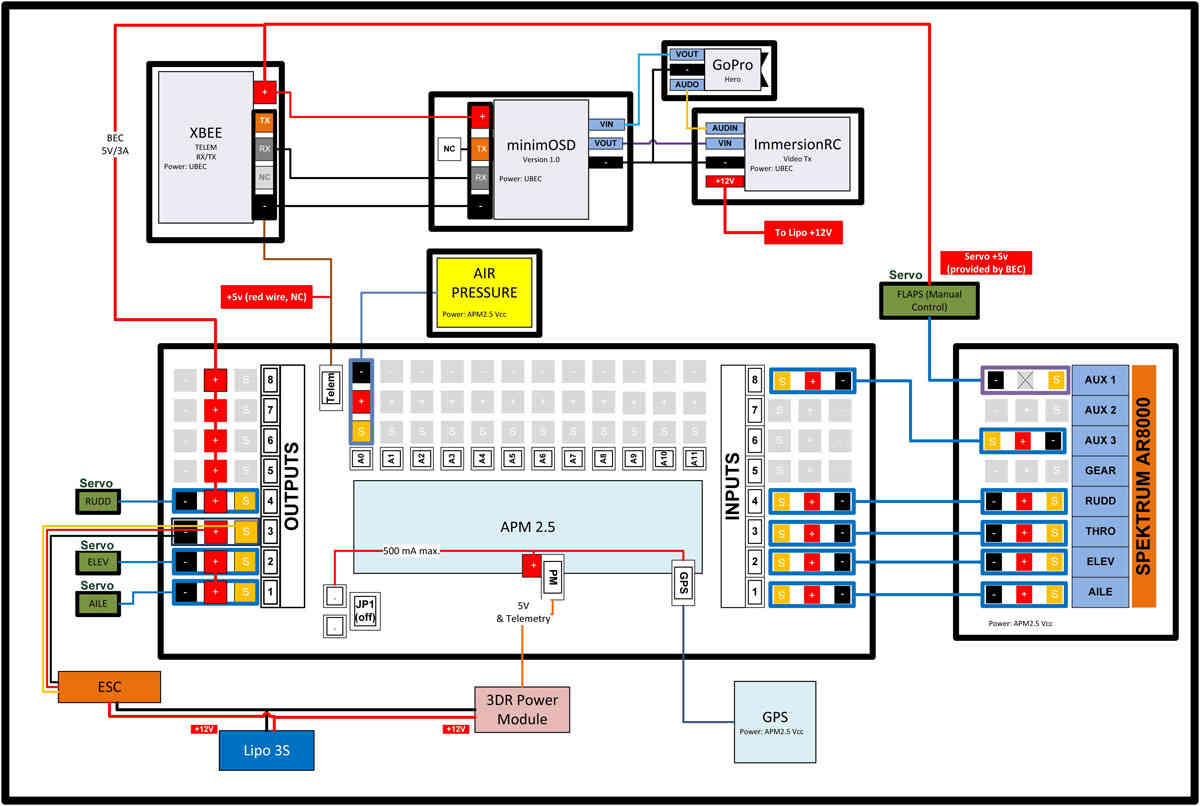
beim Rover und Copter werden die Motorausgange mit den Servos belegt:
Tippe mal Motor an M1 und die Servos an M2 und M3 oder M4 wie beim meinem Rover.
http://ardupilot.org/plane/docs/common-servo.html
Nach Verkablung der Servos, bitte beachte die 5V für
die Servos müssen seperat eingespeist werden.
Dann Funke im MP kalibrieren und an den Motorausgängen
(oben im Fotos) die Servos testen
EDIT:
http://ardupilot.org/plane/_images/bixl ... 1200px.jpg
http://ardupilot.org/plane/docs/archive ... start.html
beim Rover und Copter werden die Motorausgange mit den Servos belegt:
Tippe mal Motor an M1 und die Servos an M2 und M3 oder M4 wie beim meinem Rover.
Genaueres habe ich bei ARDUPILOT nich gefunden:On Plane the servos may also be connected to any available channel RC1 ~ RC8 on the back of the APM.
http://ardupilot.org/plane/docs/common-servo.html
Nach Verkablung der Servos, bitte beachte die 5V für
die Servos müssen seperat eingespeist werden.
Dann Funke im MP kalibrieren und an den Motorausgängen
(oben im Fotos) die Servos testen
EDIT:
http://ardupilot.org/plane/_images/bixl ... 1200px.jpg
http://ardupilot.org/plane/docs/archive ... start.html
- Folgende Benutzer bedankten sich beim Autor Wolle Can Fly für den Beitrag:
- doelle4 (11:48 ,Sa 18. Feb 2017,)
- Bewertung: 5%
... gutes Gelingen !
wünscht Wolle
vorallem bei der Gesundheit !
wünscht Wolle
vorallem bei der Gesundheit !
-
mastersurferde
- Forumskönig
- Wohnort:: Bayern
- Hat sich bedankt: 52 Mal
- Danksagung erhalten: 294 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Hi,
http://ardupilot.org/plane/docs/archive ... start.html
was Wolfgang da geschrieben hat passt.
Bei meinem großen Nuri sind auch die Servos auf Ausgang 1 und 2 und das ESC auf Ausgang 3. Über das BEC des ESC´s werden gleich die Servos versorgt.
@Hans: Überleg Dir, eventuell statt des APM einen F3 einzubauen. Ich glaub, das wird wesentlich einfacher, den ohne viel Kabelgewirr in die Luft zu bekommen. Eventuell gleich mit eingebautem OSD. Auf ein Powermodul kannst dann auch verzichten. Ein ESC mit 2 Ampere BEC reicht dafür völlig.
Gruß
Stefan
http://ardupilot.org/plane/docs/archive ... start.html
was Wolfgang da geschrieben hat passt.
Bei meinem großen Nuri sind auch die Servos auf Ausgang 1 und 2 und das ESC auf Ausgang 3. Über das BEC des ESC´s werden gleich die Servos versorgt.
@Hans: Überleg Dir, eventuell statt des APM einen F3 einzubauen. Ich glaub, das wird wesentlich einfacher, den ohne viel Kabelgewirr in die Luft zu bekommen. Eventuell gleich mit eingebautem OSD. Auf ein Powermodul kannst dann auch verzichten. Ein ESC mit 2 Ampere BEC reicht dafür völlig.
Gruß
Stefan
-
pacman111178

- Drohnenkommandant
- Wohnort:: Dahlem
- Hat sich bedankt: 2 Mal
- Danksagung erhalten: 10 Mal
Beitrag
Gruß Boris
Re: RE: Re: Zeta Wing Wing Z-84 RC Modell
Ne tödliche mischung wenn er mal Oszilliert ... schon selber mitbekommen das der F3 Fc einfach abgeschaltet hat .. immer externes Bec benutzen ist besser für den Prozessor und für den flieger ..mastersurferde hat geschrieben:Hi,
Bei meinem großen Nuri sind auch die Servos auf Ausgang 1 und 2 und das ESC auf Ausgang 3. Über das BEC des ESC´s werden gleich die Servos versorgt.
@Hans: Überleg Dir, eventuell statt des APM einen F3 einzubauen. Ich glaub, das wird wesentlich einfacher, den ohne viel Kabelgewirr in die Luft zu bekommen.
Gruß Boris
Gruß Boris
-
doelle4
- Inventar
- Kontaktdaten:
- Wohnort:: A-3900 Kleinreichenbach
- Kopter & Zubehör: Cheerson CX20, Mobius Gimbal, FPV, Karbon Beine. CX-21, Syma X5C ,Zerotech Dobby, Eachine Falcon 180 und andere
- Hat sich bedankt: 246 Mal
- Danksagung erhalten: 842 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
F3 deluxe wäre gut und zweckmäßig mit dem internen OSD , bloss ich ich scheue den Einsatz.
APM habe ich schon und die MP Oberfläche ist mir sehr vertraut und der Einsatz ist lang bewährt.
Mit F3 habe ich schlechte Erfahrungen da ich schon 2 hatte wovon einer nach einer Woche zu spinnen begann und dann ganz hinüber war und der 2.te lässt sich gar nicht flashen. Die F3 verwende ich nur wo es sein muss, daher am Racer.
Bleibe daher bei dem was schon ewig zuverlässig ohne Faxen zuverlässig geht zumal ein Flugzeug keinen schnellen FC braucht da es träge ist.
Servos versorge ich mit 5V vom ESC, habe ich auch bei meiner Schwenkcam am CX-21 so.
Gruß Hans
APM habe ich schon und die MP Oberfläche ist mir sehr vertraut und der Einsatz ist lang bewährt.
Mit F3 habe ich schlechte Erfahrungen da ich schon 2 hatte wovon einer nach einer Woche zu spinnen begann und dann ganz hinüber war und der 2.te lässt sich gar nicht flashen. Die F3 verwende ich nur wo es sein muss, daher am Racer.
Bleibe daher bei dem was schon ewig zuverlässig ohne Faxen zuverlässig geht zumal ein Flugzeug keinen schnellen FC braucht da es träge ist.
Servos versorge ich mit 5V vom ESC, habe ich auch bei meiner Schwenkcam am CX-21 so.
Gruß Hans
-
mastersurferde
- Forumskönig
- Wohnort:: Bayern
- Hat sich bedankt: 52 Mal
- Danksagung erhalten: 294 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Wenn es mir zeitlich rausgeht, dann bau ich in den Z-84 den F3 ein. Bestellt hab ich den mal. Allerdings ohne OSD, weil ich noch keinen mit OSD gefunden habe, der mir genügend serielle Schnittstellen bietet.
OK - wenn der F3 so empflindlich mit der Spannungsversorgung ist, dann spendier ich halt doch ein Powermodul, dann kann ich auch gleich den Stromverbrauch telemetrieren.
Gruß
Stefan
OK - wenn der F3 so empflindlich mit der Spannungsversorgung ist, dann spendier ich halt doch ein Powermodul, dann kann ich auch gleich den Stromverbrauch telemetrieren.
Gruß
Stefan
-
pacman111178
- Drohnenkommandant
- Wohnort:: Dahlem
- Hat sich bedankt: 2 Mal
- Danksagung erhalten: 10 Mal
Beitrag  !
!
Man muss gewohnheiten auch mal ziehen lassen ! Ich fand den C64 früher auch gut und war sehr mit ihm vertraut !
Die Ez gui wird fast einmal die woche aktuallisiert genauso wie die Inav software ... Apm ist am ende .. 3.2.1. schluss
Gruß Boris
Re: RE: Re: Zeta Wing Wing Z-84 RC Modell
Ach für den einsatz im Racer wo er mal richtig rechnen muss da kann man den Apm nicht brauchendoelle4 hat geschrieben:F3 deluxe wäre gut und zweckmäßig mit dem internen OSD , bloss ich ich scheue den Einsatz.
APM habe ich schon und die MP Oberfläche ist mir sehr vertraut und der Einsatz ist lang bewährt.
Mit F3 habe ich schlechte Erfahrungen da ich schon 2 hatte wovon einer nach einer Woche zu spinnen begann und dann ganz hinüber war und der 2.te lässt sich gar nicht flashen. Die F3 verwende ich nur wo es sein muss, daher am Racer.
Bleibe daher bei dem was schon ewig zuverlässig ohne Faxen zuverlässig geht zumal ein Flugzeug keinen schnellen FC braucht da es träge ist.
Servos versorge ich mit 5V vom ESC, habe ich auch bei meiner Schwenkcam am CX-21 so.
Gruß Hans
! Man muss gewohnheiten auch mal ziehen lassen ! Ich fand den C64 früher auch gut und war sehr mit ihm vertraut !
Die Ez gui wird fast einmal die woche aktuallisiert genauso wie die Inav software ... Apm ist am ende .. 3.2.1. schluss
Gruß Boris
Gruß Boris
-
doelle4
- Inventar
- Kontaktdaten:
- Wohnort:: A-3900 Kleinreichenbach
- Kopter & Zubehör: Cheerson CX20, Mobius Gimbal, FPV, Karbon Beine. CX-21, Syma X5C ,Zerotech Dobby, Eachine Falcon 180 und andere
- Hat sich bedankt: 246 Mal
- Danksagung erhalten: 842 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Apm ist am ende, der Spruch kommt immer wieder. Bloss warumm soll was problemlos funktionierendes am Ende sein?
Mehr als zuverlässig den Zweck erfüllen muss es nicht. Die Videos mit den 40-70 km Missionen waren auch mit APM geflogen.
Solange ich bestehendes nicht voll ausgenützt habe und alle Funktionen nütze brauche ich nicht noch mehr wirrwarr.
Inav und andere Oberflächen werden noch lange brauchen bis sie die vielfältägigen Möglichkeites des MP erreicht haben zumal ich Browser Apps wie Cleanflight, Inav, Beta Flight und anderes in der Reihe mag nicht mag nicht so, wie auch den Chrome Browser den ich dafür extra installiert haben muss was mich auch stört. Ständige Aktualisierungen sind immer eine umstellung mir nicht so liegt.
Bin da generell sehr konservativ da für mich nur das Ergebniss zählt und nicht ob was neue Mode ist.
Gruß Hans
Mehr als zuverlässig den Zweck erfüllen muss es nicht. Die Videos mit den 40-70 km Missionen waren auch mit APM geflogen.
Solange ich bestehendes nicht voll ausgenützt habe und alle Funktionen nütze brauche ich nicht noch mehr wirrwarr.
Inav und andere Oberflächen werden noch lange brauchen bis sie die vielfältägigen Möglichkeites des MP erreicht haben zumal ich Browser Apps wie Cleanflight, Inav, Beta Flight und anderes in der Reihe mag nicht mag nicht so, wie auch den Chrome Browser den ich dafür extra installiert haben muss was mich auch stört. Ständige Aktualisierungen sind immer eine umstellung mir nicht so liegt.
Bin da generell sehr konservativ da für mich nur das Ergebniss zählt und nicht ob was neue Mode ist.
Gruß Hans

{kind=link}
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Was mich am APM - jedenfalls für die Hardware welche nur bis zur 3.2.1 unterstützt wird - stört, ist das die Sinkgeschwindigkeit im SportMode absolut grottig ist.... (Bug, da der angegebene Parameter nicht zieht). Da ich keine Lust habe, am lebendigen Objekt sämtliche Parameter auszuprobieren, welcher durch Zufall ziehen könnten, werden andere FCs ausprobiert.
Gruß Dirk
-
pacman111178
- Drohnenkommandant
- Wohnort:: Dahlem
- Hat sich bedankt: 2 Mal
- Danksagung erhalten: 10 Mal
Beitrag
Re: Zeta Wing Wing Z-84 RC Modell
Hi
@ Hans ... war nicht Böse gemeint .. habe selber einen Apm2.6 X650F Kopter . Habe aber immer mehr Problem mit dem Mission Planner den Kopter zu verbinden , genauso wie mit der Tower App , der.muss man zweimal sagen " Verbinden " keine ahnung was da los ist aber die Firmware ist immer die gleiche ! Das schlimmste was ich am Apm finde ist Pids einstellen mit der Tower App . Da finde ichbdie EZ Gui 10 mal besser ... da hat man alles im Überblick .
Sowas sucht man vergeblich in der Tower app .
Achso ... die Autotrimm funktioniert klappt ab Inav 1.5.1 wirklich !
Gruß Boris
@ Hans ... war nicht Böse gemeint .. habe selber einen Apm2.6 X650F Kopter . Habe aber immer mehr Problem mit dem Mission Planner den Kopter zu verbinden , genauso wie mit der Tower App , der.muss man zweimal sagen " Verbinden " keine ahnung was da los ist aber die Firmware ist immer die gleiche ! Das schlimmste was ich am Apm finde ist Pids einstellen mit der Tower App . Da finde ichbdie EZ Gui 10 mal besser ... da hat man alles im Überblick .

Sowas sucht man vergeblich in der Tower app .
Achso ... die Autotrimm funktioniert klappt ab Inav 1.5.1 wirklich
! Gruß Boris
Gruß Boris
-
doelle4
- Inventar
- Kontaktdaten:
- Wohnort:: A-3900 Kleinreichenbach
- Kopter & Zubehör: Cheerson CX20, Mobius Gimbal, FPV, Karbon Beine. CX-21, Syma X5C ,Zerotech Dobby, Eachine Falcon 180 und andere
- Hat sich bedankt: 246 Mal
- Danksagung erhalten: 842 Mal
Beitrag
Zeta Wing Wing Z-84 RC Modell
Ja kein Problem Leute . Aber hier gehts rein um den Einsatz in einem Flieger wo der APM nur einen Motor und 2 träge Klappen regeln muss und um autonome Mission planen im MP wenn alles drann ist.
No Pids, No Trudeleffekt beim Abstieg. Die 2 lausige Flaps über billig Servos regeln wird er doch wohl schaffen.
Gruß Hans
No Pids, No Trudeleffekt beim Abstieg. Die 2 lausige Flaps über billig Servos regeln wird er doch wohl schaffen.
Gruß Hans



