ich bin dabei aus einem GoDiscover Nurflügler ein VTOL Flieger zu bauen. Im ersten Schritt will ich natürlich nichts anderes als den reinen, puren GoDiscover als FPV und Autonomous Flieger herstellen.
Ich habe mich mit Unterstützung des Ardupilot Wiki zunächst mal die Funke und den Empfänger so eingestellt, das die Servos des Fliegers einwandfrei arbeiten. Das hat mit den richtigen Mixer Einstellungen auch prima funktioniert. Über den APM hakt es ganz furchtbar. Die Belegung des FC-losen Fliegers lauten:
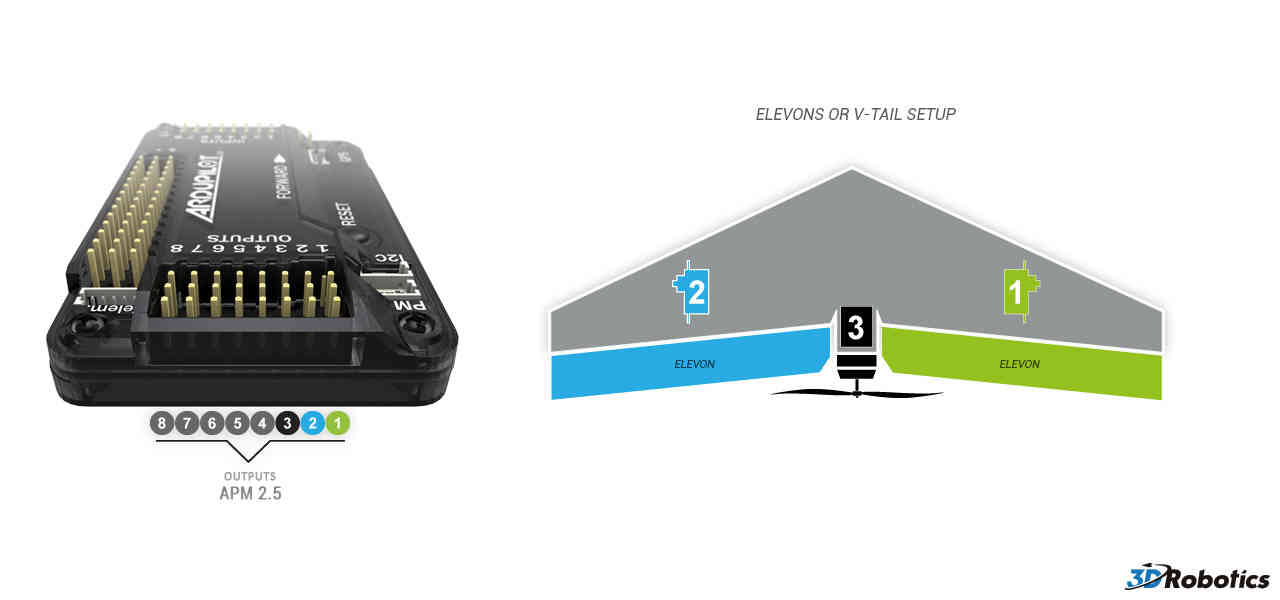
- Kanal 1 := linkes Ruder
Kanal 2 := Throttle
Kanal 3 := rechtes Ruder
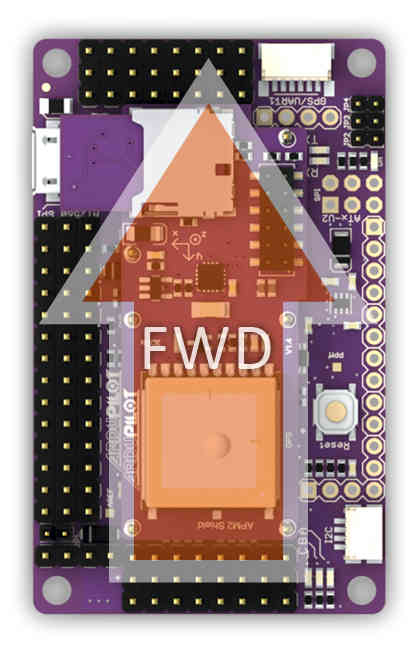
Die Einbaulage des APM ist quer zur Flugrichtung, der Pfeil zeigt nach rechts.
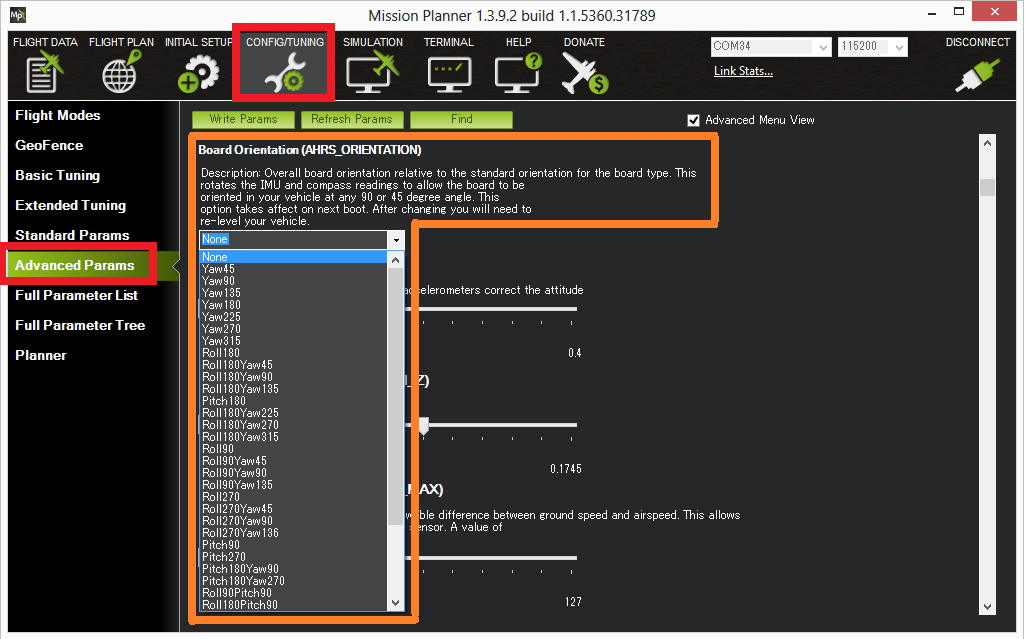
Ich weiß, das es einige Parameterwerte gibt, mit denen ich dem FC mitteilen kann in welcher Einbaulage er sich befindet. Einen passenden Parameter habe ich in der Full Parameter List nicht gefunden. Jedenfalls nicht auf die Schnelle.
Für Hinweise bin ich bereits jetzt sehr dankbar.
CU later
Michael